
Research hotspots and development trends of harvesting robots based on bibliometric analysis and knowledge graphs
Keywords:
harvesting robots, crops harvesting, bibliometric analysis, research hotspotsAbstract
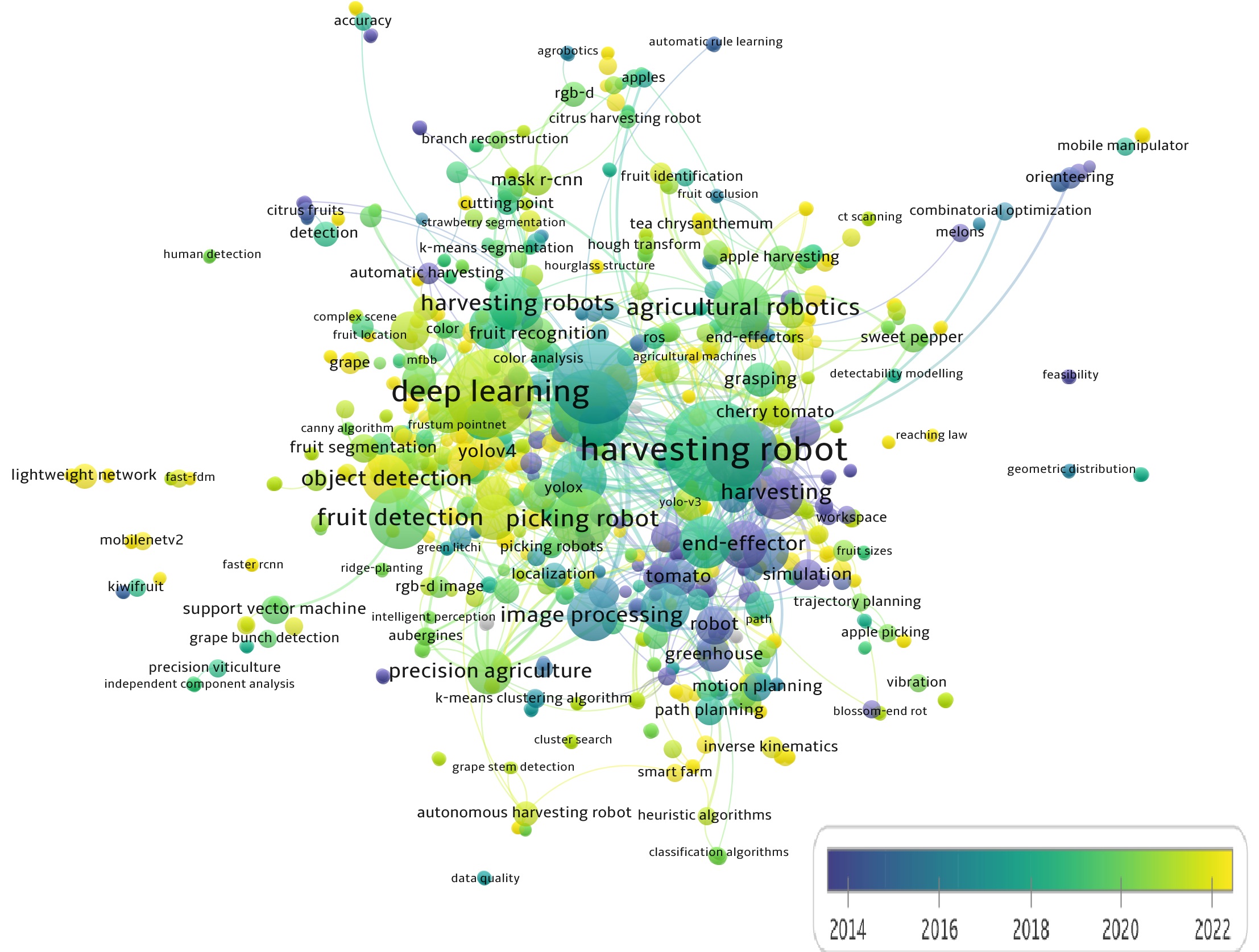
Over the past 30 years, there has been continuous progress in global science and technology. However, many agricultural products still heavily rely on traditional methods of manual and mechanical harvesting, facing challenges such ashigh costs and low efficiency. To address these challenges, researchers have developed various harvesting robots to handle diverse tasks in complex farm environments. This study analyzed pertinent papers on harvesting robots retrieved from the Web of Science (WOS) core database and the China National Knowledge Infrastructure (CNKI) database, spanning the years 1993 to 2022. Using specialized software such as CiteSpace and VOSviewer, a bibliometric analysis was conducted to examine the research progress and hotspots in the field of harvesting robots. The analysis of 517 English papers indicated a continuous expansion in the research scale of harvesting robots. Furthermore, the research history can be divided into three distinct periods. Currently, research on harvesting robots is experiencing a rapid growth phase, with the number of related papers steadily increasing each year. In the year 2022 alone, 151 English papers were published. This growth is attributed to close collaborations among different countries/regions, institutions, and authors. China, the United States, and Japan play crucialroles in the research of harvesting robots. Notably, China has published 326 English papers, ranking first globally. Through analysis, it was also found that Chinese papers focused on harvesting robots earlier, thereby promoting the development ofagricultural robots. Additionally, bibliometric analysis revealed that the research hotspots of harvesting robots mainly include system and structure design, object recognition and localization, and multi-robot coordination, among others. In the future, development trends of harvesting robots will focus on: 1) diversifying robot types, 2) expanding application scenarios,3) enhancing overall performance to reduce losses, and 4) reducing manufacturing costs. In conclusion, through acomprehensive bibliometric analysis, this study has provided valuable insights to advance the automation of harvesting. Keywords: harvesting robots, crops harvesting, bibliometric analysis, research hotspots DOI: 10.25165/j.ijabe.20241706.8739 Citation: Zhou J G, Wang Y K, Chen J, Luo T Y, Hu G R, Jia J L, et al. Research hotspots and development trends of harvesting robots based on bibliometric analysis and knowledge graphs. Int J Agric & Biol Eng, 2024; 17(6): 1–10.References
Sun L L, Sun H R, Cao N, Han X L, Cao G S, Huo W, et al. Intelligent agriculture technology based on internet of things. Intelligent Automation and Soft Computing, 2022; 32 (1): 429–439.
Khare D, Cherussery S, Mohan S. Investigation on design and control aspects of a new autonomous mobile agricultural fruit harvesting robot. P I Mech Eng C-J Mec., 2022; 236 (18): 9966–9977.
Zhang Z, Wang Y J, Zhang Z H, Li D P, Wu Z Z, Bai R, Meng G F. Ergonomic and efficiency analysis of conventional apple harvest process. Int J Agric & Biol Eng, 2019; 12(2): 210–217.
Guo G C, Wen Q Y, Zhu J J. The impact of aging agricultural labor population on farmland output: From the perspective of farmer preferences. Math Probl Eng, 2015; 2015: 730618.
Yu X J, Fan Z M, Wang X D, Wan H, Wang P B, Zeng X L, Jia F. A lab-customized autonomous humanoid apple harvesting robot. Comput Electr Eng., 2021; 96: 107459.
Williams H A M, Jones M H, Nejati M, Seabright M J, Bell J, Penhall N D, et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst Eng, 2019; 181: 140–156.
Yang Q H, Chang C, Bao G J, Fan J, Xun Y. Recognition and localization system of the robot for harvesting Hangzhou White Chrysanthemums. Int J Agric & Biol Eng, 2018; 11(1): 88–95.
Magalhaes S A, Moreira A P, dos Santos F N, Dias J. Active perception fruit harvesting robots - A systematic review. J Intell Robot Syst, 2022; 105(1): 22,
Gao J, Zhang F, Zhang J X, Yuan T, Yin J L, Guo H, Yang C. Development and evaluation of a pneumatic finger-like end-effector for cherry tomato harvesting robot in greenhouse. Comput Electron Agric, 2022; 197: 106879.
Van Henten E J, Hemming J, Van Tuijl B A J, Kornet J G, Meuleman J, Bontsema J, Van Os E A. An autonomous robot for harvesting cucumbers in greenhouses. Auton Robot, 2002; 13(3): 241–258.
Villa-Henriksen A, Edwards G T C, Green O, Sorensen C A G. Evaluation of grain quality-based simulated selective harvest performed by an autonomous agricultural robot. Agronomy-Basel, 2021; 11(9): 1728.
Meaclem C V, Chen X Q, Gutschmidt S, Hann C, Parker R. K-means partitioned space path planning (KPSPP) for autonomous robotic harvesting. Int J Adv Robot Syst, 2015; 12: 61816.
Yang H L, Chen L, Chen M T, Ma Z B, Deng F, Li M Z, Li X R. Tender tea shoots recognition and positioning for picking robot using improved YOLO-V3 model. IEEE Access, 2019; 7: 180998–181011.
Li D H, Sun X X, Elkhouchlaa H, Jia Y H, Yao Z W, Lin P Y, et al. Fast detection and location of longan fruits using UAV images. Comput Electron Agric., 2021; 190: 15: 106465.
Hayashi S, Shigematsu K, Yamamoto S, Kobayashi K, Kohno Y, Kamata J, Kurita M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst Eng., 2010; 105 (2): 160–171.
Chen M Y, Tang Y C, Zou X J, Huang Z F, Zhou H, Chen S Y. 3D global mapping of large-scale unstructured orchard integrating eye-in-hand stereo vision and SLAM. Comput Electron Agric, 2021; 187: 106237.
Motokura K, Takahashi M, Ewerton M, Peters J. Plucking motions for tea harvesting robots using probabilistic movement primitives. IEEE Robot Autom Let, 2020; 5(2): 3275–3282.
Xu L J, Xie Y, Chen X Y, Chen Y J, Kang Z L, Huang P, et al. Design of an efficient combined multipoint picking scheme for tea buds. Front Plant Sci., 2022; 13: 1042035.
Bai Y H, Guo Y X, Zhang Q, Cao B Y, Zhang B H. Multi-network fusion algorithm with transfer learning for green cucumber segmentation and recognition under complex natural environment. Comput Electron Agric., 2022; 194: 106789.
Van Henten E J, Hemming J, Van Tuijl B A J, Kornet J G, Bontsema J. Collision-free motion planning for a cucumber picking robot. Biosyst Eng., 2003; 86 (2): 135–144.
Liu J Z, Peng Y, Faheem M. Experimental and theoretical analysis of fruit plucking patterns for robotic tomato harvesting. Comput Electron Agric, 2020; 173: 105330.
Kondo N, Nishitsuji Y, Ling P P, Ting K C. Visual feedback guided robotic cherry tomato harvesting. T Asae, 1996; 39(6): 2331–2338.
Hayashi S, Ganno K, Ishii Y, Tanaka I. Robotic harvesting system for eggplants. Jarq-Jpn Agr Res Q, 2002; 36(3): 163–168.
Blanes C, Ortiz C, Mellado M, Beltrán P. Assessment of eggplant firmness with accelerometers on a pneumatic robot gripper. Comput Electron Agric, 2015; 113: 44–50.
Arad B, Balendonck J, Barth R, Ben-Shahar O, Edan Y, Hellström T, et al. Development of a sweet pepper harvesting robot. J Field Robot., 2020; 37(6): 1027–1039.
Bac C W, Hemming J, van Henten E J. Robust pixel-based classification of obstacles for robotic harvesting of sweet-pepper. Comput Electron Agric, 2013; 96: 148–162.
Xiong Y, Ge Y Y, Grimstad L, From P J. An autonomous strawberry‐harvesting robot: Design, development, integration, and field evaluation. J Field Robot, 2019; 37(2): 202–224.
Yamamoto S, Hayashi S, Yoshida H, Kobayashi K. Development of a stationary robotic strawberry harvester with a picking mechanism that approaches the target fruit from below. Jarq-Jpn Agr Res Q, 2014; 48(3): 261–269.
Tang Z L, Xu L J, Wang Y C, Kang Z L, Xie H. Collision-free motion planning of a six-link manipulator used in a citrus picking robot. App.Sci-Basel, 2021; 11(23): 11336.
Qiang L, Cai J R, Bin L, Lie D, Zhang Y J. Identification of fruit and branch in natural scenes for citrus harvesting robot using machine vision and support vector machine. Int J Agric & Biol Eng, 2014; 7(2): 115–121.
Fu L S, Wang B, Cui Y J, Su S, Gejima Y, Kobayashi T. Kiwifruit recognition at nighttime using artificial lighting based on machine vision. Int J Agric & Biol Eng, 2015; 8(4): 52–59.
Williams H, Ting C, Nejati M, Jones M H, Penhall N, Lim J, et al. Improvements to and large‐scale evaluation of a robotic kiwifruit harvester. J Field Robot, 2019; 37(2): 187–201.
Zhao D A, Lv J D, Ji W, Zhang Y, Chen Y. Design and control of an apple harvesting robot. Biosyst Eng, 2011; 110(2): 112–122.
Hohimer C J, Wang H, Bhusal S, Miller J, Mo C, Karkee M. Design and field evaluation of a robotic apple harvesting system with a 3d-printed soft-robotic end-effector. T ASABE, 2019; 62(2): 405–414.
Xiao X, Wang Y N, Jiang Y M. End-Effectors developed for citrus and other spherical crops. App.Sci-Basel, 2022; 12(15): 7945.
Fue K, Porter W, Barnes E, Li C Y, Rains G. Center-Articulated hydrostatic cotton harvesting rover using visual-servoing control and a finite state machine. Electronics, 2020; 9(8): 1226.
Zhang K X, Lammers K, Chu P Y, Li Z J, Lu R F. System design and control of an apple harvesting robot. Mechatronics, 2021; 79: 102644.
Zahid A, Mahmud M S, He L, Choi D, Heinemann P, Schupp J. Development of an integrated 3R end-effector with a cartesian manipulator for pruning apple trees. Comput Electron Agric, 2020; 179: 105837.
Kang M L, Fan Z M, Yu X J, Wan H, Chen Q H, Wang P B, Fu L S. Division-merge based inverse kinematics for Multi-DOFs humanoid robots in unstructured environments. Comput Electron Agric, 2022; 198: 107090.
Xie H B, Kong D Y, Wang Q. Optimization and experimental study of bionic compliant end-effector for robotic cherry tomato harvesting. J Bionic Eng, 2022; 19(5): 1314–1333.
Li J G, Liu X M, Zou L L, Yuan J, Du S. Analysis of the interaction between end-effectors, soil and asparagus during a harvesting process based on discrete element method. Biosyst Eng, 2020; 196: 127–144.
Liu J Z, Hu Y, Xu X Q, Li P P. Feasibility and influencing factors of laser cutting of tomato peduncles for robotic harvesting. Afr J Biotechnol, 2011; 10(69): 15552–15563.
Donthu N, Kumar S, Mukherjee D, Pandey N, Lim W M. How to conduct a bibliometric analysis: An overview and guidelines. J Bus Res, 2021; 133: 285–296.
Li W, Zhao Y. Bibliometric analysis of global environmental assessment research in a 20-year period. Environ Impact Asses, 2015; 50: 158–166.
Bertoglio R, Corbo C, Renga F M, Matteucci M. The digital agricultural revolution: A bibliometric analysis literature review. IEEE Access, 2021; 9: 134762–134782.
Jiang Y Y, Gao Y, Song W Q, Li Y, Quan Q. Bibliometric analysis of UAV swarms. J Syst Eng Electron, 2022; 33(2): 406–425.
Ni P, Niu H, Tang Y R, Zhang Y B, Zhang W Y, Liu Y, Lan H P. Bibliometrics and visual analysis of non-destructive testing technology for fruit quality. Horticulturae, 2023; 9(10): 1091.
Bac C W, van Henten E J, Hemming J, Edan Y. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J Field Robot, 2014; 31(6): 888–911.
Tsolakis N, Bechtsis D, Bochtis D. AgROS: A robot operating system based emulation tool for agricultural robotics. Agronomy-Basel, 2019; 9(7): 403.
Bechar A, Vigneault C. Agricultural robots for field operations: Concepts and components. Biosyst Eng, 2016; 149: 94–111.
Liu C L, Gong L, Yuan J, Li Y M. Current status and development trends of agricultural robots. Transactions of the CSAM, 2022; 53(7): 1–22, 55.
Wang Z H, Xun Y, Wang Y K, Yang Q H. Review of smart robots for fruit and vegetable picking in agriculture. Int J Agric & Biol Eng, 2022; 15(1): 33–54.
Laengle S, Merigó J M, Miranda J, Slowinski R, Bomze I, Borgonovo E, et al. Forty years of the European Journal of Operational Research: A bibliometric overview. Eur J Oper Res, 2017; 262(3): 803–816.
Zhang Y L, Zhao D H, Liu H C, Huang X R, Deng J Z, Jia R C, et al. Research hotspots and frontiers in agricultural multispectral technology: Bibliometrics and scientometrics analysis of the Web of Science. Front Plant Sci, 2022; 13: 955340.
Moral-Muñoz J A, Herrera-Viedma E, Santisteban-Espejo A, Cobo M J. Software tools for conducting bibliometric analysis in science: An up-to-date review. Prof Inform, 2020; 29(1): ene.03.
Pan X L, Yan E J, Cui M, Hua W N. Examining the usage, citation, and diffusion patterns of bibliometric mapping software: A comparative study of three tools. J Informetr, 2018; 12(2): 481–493.
Fu L H, Yang Z, Wu F Y, Zou X J, Lin J Q, Cao Y J, Duan J L. YOLO-Banana: A lightweight neural network for rapid detection of banana bunches and stalks in the natural environment. Agronomy-Basel, 2022; 12(2): 391.
Au C, Barnett J, Lim S H, Duke M. Workspace analysis of Cartesian robot system for kiwifruit harvesting. Ind Robot, 2020; 47(4): 503–510.
Sarig Y. Robotics of fruit harvesting - a state-of-the-art review. J Agr Eng Res, 1993; 54(4): 265–280.
Plebe A, Grasso G. Localization of spherical fruits for robotic harvesting. Mach Vision Appl, 2001; 13(2): 70–79.
Gongal A, Amatya S, Karkee M, Zhang Q, Lewis K. Sensors and systems for fruit detection and localization: A review. Comput Electron Agric, 2015; 116: 8–19.
Blanes C, Mellado M, Ortiz C, Valera A. Technologies for robot grippers in pick and place operations for fresh fruits and vegetables. Span J Agric Res, 2011; 9(4): 1130–1141.
Vrochidou E, Tsakalidou V N, Kalathas I, Gkrimpizis T, Pachidis T, Kaburlasos V G. An overview of end effectors in agricultural robotic harvesting systems. Agriculture-Basel, 2022; 12(8): 1240.
Moreira G, Magalhaes S A, Pinho T, dos Santos F N, Cunha M. Benchmark of deep learning and a proposed HSV colour space models for the detection and classification of greenhouse tomato. Agronomy-Basel, 2022; 356(2): 356.
Barth R, Hemming J, Van Henten E J. Angle estimation between plant parts for grasp optimisation in harvest robots. Biosyst Eng, 2019; 183: 26–46.
Bulanon D M, Kataoka T, Ota Y, Hiroma T. Segmentation algorithm for the automatic recognition of apples at harvest. Biosyst Eng, 2002; 83(4): 405–412.
Rath T, Kawollek M. Robotic harvesting of Gerbera Jamesonii based on detection and three-dimensional modeling of cut flower pedicels. Comput Electron Agric, 2009; 66(1): 85–92.
Xie D B, Chen L, Liu L C, Chen L Q, Wang H. Actuators and sensors for application in agricultural robots: A review. Machines, 2022; 10(10): 913.
Chen W, Xu T Q, Liu J J, Wang M, Zhao D A. Picking robot visual servo control based on modified fuzzy neural network sliding mode algorithms. Electronics, 2019; 8(6): 605.
Edan Y, Rogozin D, Flash T, Miles G E. Robotic melon harvesting. IEEE T Robotic Autom, 2000; 16(6): 831–835.
Barth R, Hemming J, van Henten E J. Design of an eye-in-hand sensing and servo control framework for harvesting robotics in dense vegetation. Biosyst Eng, 2016; 146: 71–84.
Ravankar A, Ravankar A A, Watanabe M, Hoshino Y, Rawankar A. Development of a low-cost semantic monitoring system for vineyards using autonomous robots. Agriculture-Basel, 2020; 10(5): 182.
Yeshmukhametov A, Koganezawa K, Yamamoto Y, Buribayev Z, Mukhtar Z, Amirgaliyev Y. Development of continuum robot arm and gripper for harvesting cherry tomatoes. App.Sci-Basel, 2022; 12(14): 6922.
Casado-García A, Heras J, Milella A, Marani R. Semi-supervised deep learning and low-cost cameras for the semantic segmentation of natural images in viticulture. Precis Agric, 2022; 23(6): 2001–2026.
Pourdarbani R, Sabzi S, Kalantari D, Paliwal J, Benmouna B, García-Mateos G, Molina-Martínez J M. Estimation of different ripening stages of Fuji apples using image processing and spectroscopy based on the majority voting method. Comput Electron Agric, 2020; 176: 105643.
Gorjian S, Calise F, Kant K, Ahamed M S, Copertaro B, Najafi G, et al. A review on opportunities for implementation of solar energy technologies in agricultural greenhouses. J Clean Prod, 2021; 285: 124807.
Li J, Karkee M, Zhang Q, Xiao K H, Feng T. Characterizing apple picking patterns for robotic harvesting. Comput Electron Agric, 2016; 127: 633–640.
Fu L S, Majeed Y, Zhang X, Karkee M, Zhang Q. Faster R-CNN-based apple detection in dense-foliage fruiting-wall trees using RGB and depth features for robotic harvesting. Biosyst Eng, 2020; 197: 245–256.
Jia W K, Wei J M, Zhang Q, Pan N N, Niu Y, Yin X, et al. Accurate segmentation of green fruit based on optimized mask RCNN application in complex orchard. Front Plant Sci, 2022; 13: 955256.
Kondo N, Monta M, Fujiura T. Basic constitution of a robot for agricultural use. Adv Robotics., 1996; 10(4): 339–353.
Kondo N. Harvesting robot based on physical-properties of grapevine. Jarq-Jpn Agr Res Q, 1995; 29(3): 171–177.
Peng H X, Xue C, Shao Y Y, Chen K Y, Liu H A, Xiong J T, et al. Litchi detection in the field using an improved YOLOv3 model. Int J Agric & Biol Eng, 2022; 15(2): 211–220.
Zhou H Y, Wang X, Au W, Kang H W, Chen C. Intelligent robots for fruit harvesting: recent developments and future challenges. Precis Agric, 2022; 23(5): 1856–1907.
Silwal A, Davidson J R, Karkee M, Mo C K, Zhang Q, Lewis K. Design, integration, and field evaluation of a robotic apple harvester. J Field Robot, 2017; 34(6): 1140–1159.
Gao F F, Fu L S, Zhang X, Majeed Y, Li R, Karkee M, Zhang Q. Multi-class fruit-on-plant detection for apple in SNAP system using Faster R-CNN. Comput Electron Agric, 2020; 176: 105634.
Yu Y, Zhang K L, Yang L, Zhang D X. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput Electron Agric, 2019; 163: 104846.
Sa I, Ge Z Y, Dayoub F, Upcroft B, Perez T, McCool C. DeepFruits: A fruit detection system using deep neural networks. Sensors, 2016; 16(8): 1222.
Tang Y C, Chen M Y, Wang C L, Luo L F, Li J H, Lian G P, Zou X J. Recognition and localization methods for vision-based fruit picking robots: A review. Front Plant Sci, 2020; 11: 510.
Wan S H, Goudos S. Faster R-CNN for multi-class fruit detection using a robotic vision system. Comput Netw, 2020; 168: 107036.
Zhao Y S, Gong L, Huang Y X, Liu C L. A review of key techniques of vision-based control for harvesting robot. Comput Electron Agric, 2016; 127: 311–323.
Tang X Y, Zhang T Z. Robotics for fruit and vegetable harvesting: A review. Robot, 2005; 1: 90–96.
Fang J J. Present situation and development of mobile harvesting robot. Transactions of the CSAE, 2004; 20(2): 273–278.
Zhao Y, Wu C Y, Hu X D, Yu G H. Research progress and problems of agricultural robot. Transactions of the CSAE, 2003; 19(1): 20–24.
Song J, Zhang T Z, Xu L M, Tang X Y. Research actuality and prospect of picking robot for fruits and vegetables. Transactions of the CSAM, 2006; 37(5): 158–162.
Ji C, Feng Q C, Yuan T, Tan Y Z, Li W. Development and performance analysis on cucumber harvesting robot system in greenhouse. Robot, 2011; 33(6): 726–730.
Gu B X, Ji C Y, Wang H Q, Tian G Z, Zhang G Y, Wang L. Design and experiment of intelligent mobile fruit picking robot. Transactions of the CSAM, 2012; 43(6): 153–160.
Cai J R, Zhou X J, Li Y L, Fan J. Recognition of mature oranges in natural scene based on machine vision. Transactions of the CSAE, 2008; 24(1): 175–178.
Zhao D A, Wu R D, Liu X Y, Zhao Y Y. Apple positioning based on YOLO deep convolutional neural network for picking robot in complex background. Transactions of the CSAE, 2019; 35(3): 164–173.
Wang H, Mao W H, Liu G, Hu X A, Li S J. Identification and location system of multi-operation apple robot based on vision combination. Transactions of the CSAM, 2012; 43(12): 165–170.
Liu J Z, Li P P, Li Z G. Hardware design of the end-effector for tomato-harvesting robot. Transactions of the CSAM, 2008; 39(3): 109–112.
Feng Q C, Zou W, Fan P F, Zhang C F, Wang X. Design and test of robotic harvesting system for cherry tomato. Int J Agric & Biol Eng, 2018; 11(1): 96–100.
Sozzi M, Cantalamessa S, Cogato A, Kayad A, Marinello F. Automatic bunch detection in white grape varieties using YOLOv3, YOLOv4, and YOLOv5 deep learning algorithms. Agronomy-Basel, 2022; 12(2): 319.
Jia W K, Tian Y Y, Luo R, Zhang Z H, Lian J, Zheng Y J. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput Electron Agric, 2020; 172: 105380.
Chen C L, Lu J Z, Zhou M C, Yi J, Liao M, Gao Z M. A YOLOv3-based computer vision system for identification of tea buds and the picking point. Comput Electron Agric, 2022; 198: 107116.
Ning Z T, Luo L F, Ding X M, Dong Z Q, Yang B F, Cai J H, et al. Recognition of sweet peppers and planning the robotic picking sequence in high-density orchards. Comput Electron Agric, 2022; 196: 106878.
Ye L, Duan J L, Yang Z, Zou X J, Chen M Y, Zhang S. Collision-free motion planning for the litchi-picking robot. Comput Electron Agric, 2021; 185: 106151.
Sepúlveda D, Fernández R, Navas E, Armada M, González-De-Santos P. Robotic aubergine harvesting using dual-arm manipulation. IEEE Access, 2020; 8: 121889–121904.
Wang D, Dong Y X, Lian J, Gu D B. Adaptive end-effector pose control for tomato harvesting robots. J Field Robot, 2023; 40(3): 535–551.
Park Y, Seol J, Pak J, Jo Y, Jun J, Son H I. A novel end-effector for a fruit and vegetable harvesting robot: mechanism and field experiment. Precis Agric, 2022: 23: 948–970.
Saleem M H, Potgieter J, Arif K M. Automation in agriculture by machine and deep learning techniques: A review of recent developments. Precis Agric, 2021; 22(6): 2053–2091.
Downloads
Published
How to Cite
Issue
Section
License
IJABE is an international peer reviewed, open access journal, adopting Creative Commons Copyright Notices as follows.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
